之前一直在做移动机器人定位算法。查来查去,发觉粒子滤波算法(又叫MC算法)应该算是最流行的了。因此开始学习使用之。入手的是本英文书叫 “probalistic robotic” 很不错,我所见到的讲得最好的一本书。花了大量时间去研读。在这里我想谈谈我对粒子滤波的一点认识。因为在这一领域算是个新手。希望有前辈或者达人来指正 我的想法。也希望我的这篇文章对新手有理解他有所帮助(当初我就很是苦于它难于理解)在这里我不想谈粒子滤波的理论基础和推到,这点大家可以去自己翻书。 我只谈下我的体会。
粒子滤波算法。他源于Montecarlo的思想,即以某事件出现的频率来指代该事件的概率。因此在滤波过程中,需要用到概率如P(x)的地方,一 概对变量x采样,以大量采样的分布近似来表示P(x)。因此,采用此一思想,在滤波过程中粒子滤波可以处理任意形式的概率,而不像Kalman滤波只能处 理高斯分布的概率问题。他的一大优势也在于此。
再来看对任意如下的状态方程
x(t)=f(x(t-1),u(t),w(t))
y(t)=h(x(t),e(t))
其中的x(t)为t时刻状态,u(t)为控制量,w(t) 和e(t)分别为模型噪声和,观测噪声。前一个当然是状态转移方程,后一个是观测方程。那么对于这么一个问题粒子滤波怎么来从观测y(t),和x(t-1),u(t) 滤出真实状态x(t)呢?
看看滤波的预估阶段:粒子滤波首先根据x(t-1) 和他的概率分布生成大量的采样,这些采样就称之为粒子。那么这些采样在状态空间中的分布实际上就是x(t-1) 的概率分布了。好,接下来依据状态转移方程加上控制量可以对每一粒子得到一个预测粒子。所有的预测粒子就代表了涉及哪些参数化的东西)。
进入校正阶段来:有了预测粒子,当然不是所有的预测粒子都能得到我们的时间观测值y对不,越是接近真实状态的粒子,当然获得越有可能获得观测值y对吧。于是我们对所有的粒子得有个评价了,这个评价就是一个条件概率P(y|xi ),直白的说,这个条件概率代表了假设真实状态x(t)取第i个粒子xi 时获得观测y的概率。令这个条件概率为第i个粒子的权重。如此这般下来,对所有粒子都进行这么一个评价,那么越有可能获得观测y的粒子,当然获得的权重越高。好了预测信息融合在粒子的分布中,观测信息又融合在了每一粒子的权重中。
哈哈最后采用重采样算法(不知道什么是重采样算法,那就只好翻书去吧),去除低权值的粒子,复制高权值的粒子。所得到的当然就是我们说需要的真实状态x(t)了,而这些重采样后的粒子,就代表了真实状态的概率分布了。
下一轮滤波,再将重采样过后的粒子集输入到状态转移方程中,直接就能够获得预测粒子了。。
初始状态的问题: 咱们一开始对x(0)一无所知对吧,那咱们就认为x(0)在全状态空间内平均分布呗。于是初始的采样就平均分布在整个状态空间中。然后将所有采样输入状态 转移方程,得到预测粒子。嘿嘿再评价下所有预测粒子的权重,当然我们在整个状态空间中只有部分粒子能够获的高权值咯。马上重采样算法来了,去除低权值的, 将下一轮滤波的考虑重点立马缩小到了高权值粒子附近。哈哈就这么简单。也很实用。
明白了没?没看糊涂吧哈哈。
如果大家看得还不过瘾,后面有根据精彩的论述。
另外lishuai在文中也提到Particle filter的以下特点:
如果跟kalman滤波相比,那确实。毕竟kalman滤波可以直接得到状态的解析估计,计算量很小。如果跟Markov定位相比,恰恰与 ricky所说相反,粒子滤波计算量小很多,而事实上,粒子滤波被用于定位的背景就是为了降低普通的Markov定位计算量相当大并且随着维数的增长计算 量迅速增长的缺陷。(Sebastian Thrun, Wolfram burgard, Dieter fox等在90年代做的一个图书馆机器人导航的项目,其中很多当时他们的工作都成了现今机器人研究领域的热点,比如粒子滤波,SLAM等)。
大家可能有几个疑问,
1. Kalman滤波或者EKF都可以做定位并且运算量小,为什么还要用什么Markov定位呢?
2. 为什么Markov定位计算量大并且随着空间维数的增长而增长剧烈?
3.为什么粒子滤波这么神奇,让计算量如此之大的Markov定位运算量骤降?
4.到底粒子滤波实质是什么?
好,现在就一一谈一下我的看法
1. Kalman滤波或者EKF都可以做定位并且运算量小,为什么还要用什么Markov定位呢?
燢alman滤波是有适用条件的,a。初始状态必须是符合正态分布。b。必须是线性系统。(当然,EKF通过将非线性系统线性化的方法处理非线性系统)。而真实的定位问题很多时候不满足以上两个条件。为什么不满足呢?
先说为什么a不满足:首先举个正态分布无法描述的反例,大家都知道,正态分布是单峰函数,也就是说机器人初始时位于工作空间中某个位置的初始概 率最大,其他地方都比这小。如果是采用地图匹配进行绝对定位,上面描述的单峰高斯函数可能就无法精确的描述事实了,比如有十个一模一样的房间。初始时把机 器人放在其中一个里面,机器人根据绝对测量传感器获得局部地图,与他携带的先验地图匹配后他发现,他现在呆的位置在他的工作空间中有10个峰值,每个房间 一个,因为十个房间一模一样,他无法区分。显然,此时a假设不成立。
再说b为什么不满足:这取决于真实机器人的物理特性,系统的状态更新方程是由里程计或者是dead reckon 得到的,系统的观测方程是由绝对定位系统(或者地图匹配)得到的。对于一般的移动机器人,无论是两个主动轮的形式还是一个主动轮一个steering wheel的形式,由此得到的状态更新方程都是非线性的。
2. 为什么Markov定位计算量大并且随着空间维数的增长而增长剧烈?
Markov定位的基本原理很简单,就是用条件概率描述状态更新,所有的可能的状态都枚举个遍,对于机器人的每一次更新,所有的可能的状态迁移 都要被更新一遍,假设我们用栅格描述工作空间,假设t时刻机器人可能的位置为p1,p2,p3,在二维情况下采用正方形栅格划分那么p1有8个邻居,记为 p11,p12,p13,…,p18.在三维情况下,采用立方体划分那么邻居就更多了,有26个。如果维数继续增加,那么邻居增加的更厉害。这里我们以二 维情况为例来阐述问题。同理,我们记p2的邻居为p21,p22,。。。p28。p3的邻居为p31,p32,。。。,p38。在t时刻可能的位置只有3 个,然而t+1时刻,所有的三个的邻居,以及p1,p2,p3都有可能成为当前位置,但是根据dead reckon的结果,我们可以排除一些小概率的邻居,减少计算量。但是随着时间的推移,整个空间中的所有点都有可能成为估计的当前位置(只不过各个位置的 概率不同而已)。这样,如果不采取措施,那状态的更新会是一件巨大的工程。并且,空间维数越大,节点数越多,计算量增长越厉害。
3.为什么粒子滤波这么神奇,让计算量如此之大的Markov定位运算量骤降?
粒子滤波强就强在它用统计的基于采样的方法来描述整个空间中的概率分布。Markov的思想是你既然当前位置的分布概率是个特殊分布,我就干脆 把你的样本空间离散化(把空间划分为栅格),计算每一个样本的概率(计算每一个栅格的概率)。但是这带来了问题2.为了解决这个问题,粒子滤波采用了另一 种思想:现在我不再均匀的把样本空间离散化了,而是根据我当前所掌握的概率分布对空间进行采样(重要性采样),显然,概率小的地方少采几个样(反正概率 小,即使采多了,每个样本差别也不大,完全可以由附近的其他样本反映);概率高的地方应该多采几个样。这样,我们可以规定,每次都采样N个,对于大概率的 地方多采,小概率的地方少采。根据概率里的大数定律,可以证明即使在维数增加的时候依然保持采N个样,仍然可以保持性能。这就是粒子滤波高的地方,当维数 非常高的情况,Markov定位都累的算不出来了,因为需要更新的状态对实在是太多了,而人家粒子滤波依然只采N个样,计算量还那样,变化不大。
4.到底粒子滤波实质是什么?
事实上,我们完全可以换一种思维来认识粒子滤波。就是基于奖励惩罚机制(强化学习)的优化的思想。
首先,根据状态转移方程,对于每个粒子的位置进行更新。但是这个更新只是基于dead reckon得到的,我们要融合绝对定位与相对定位,绝对定位的信息还没有融合进去呢。根据状态转移方程得到的新状态到底行不行?能有多大的概率?这还取 决于绝对定位的结果也就是输出方程。把状态转移方程的到的结果代入输出方程,得到一个输出,这个输出是估计值,而根据绝对定位的观测,这个值对应的观测值 也是可以测量得到的,现在这两个值之间有个差额,很明显,这个差额越小,刚才的到的状态越可信,这个差额越大,状态越不可信。好,就把这个指标作为评估函 数(像GA,pso等优化算法里的evaluation function),来修正各个状态的估计概率。
总结一下,粒子滤波就是一种基于动态系统前向模型利用奖惩机制估计状态值的一种方法。
转自:http://blog.csdn.net/volkswageos/article/details/6508047
1. http://www.openslam.org/
2. http://www-personal.acfr.usyd.edu.au/nebot/victoria_park.htm 经典数据库
3. http://babel.isa.uma.es/mrpt/index.php/Main_Page 2008年开始陆续出现了一些好文章.
4. http://cres.usc.edu/radishrepository/view-all.php 包含了大量的用于验证SLAM算法的数据.
5. http://robots.stanford.edu/papers.html Standford 研究团队
6. http://www.isa.uma.es/C13/jlblanco/default.aspx 西班牙的一个博士生.编程能力极强. 另外Jose Neira带领的团队也比较猛.
7. http://cml.mit.edu/~jleonard/ 麻省理工的一个团队,参加了DARPA的智能车挑战赛。目前主要从事水下SLAM的研究。
另外现在的利用飞机采集数据,研究SLAM是目前的一个热点。最近几年,理论上的突破已经很有限。大量研究者开始转向视觉SLAM。
代表人物牛津大学的Andrew Davison (http://www.doc.ic.ac.uk/~ajd/)
几个牛人:
1. Tim Beily 及所在的 悉尼大学一些研究者
2.Giorgio Grisetti; Cyrill Stachniss; Wolfram Burgard; (GridMapping 算法,及概率机器人一书作者)
3. ;M. Montemerlo; Dirk Haehnel; Sebastian Thrun; (FastSLAM创始者,理论水平和实际应用能力非常强)。参加过DARPA的智能车挑战赛,取得最好成绩。
4. Austin Eliazar; Ronald Parr; (DP-SLAM创始者,从文章到数据,程序都公开的牛人)
http://www.cs.duke.edu/~eliazar
http://www.cs.duke.edu/~parr
5. 以 Jose Neira和Jose luis Blanco为代表的一批西班牙学者.
6. Andrew Davison 视觉SLAM 领域的权威。
7.John Leonard 侧重于 应用。目前主要在做水下SLAM的项目。参加过DARPA的智能车挑战赛。
http://cml.mit.edu/~jleonard
转自:http://www.cnblogs.com/feisky/archive/2009/11/09/1599301.html
输入图像:
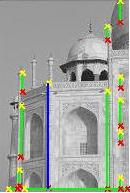
输出图像:
源代码:
(参考Matlab houghlines 例程)
clear
I = imread('taj1small3.jpg');
I = rgb2gray(I);
%I = imrotate(I,33,'crop');
% figure
% imshow(rotI);
figure
imshow(I);
BW = edge(I,'canny');
figure
imshow(BW);
[H,T,R] = hough(BW);
figure
imshow(H,[],'XData',T,'YData',R,

'InitialMagnification','fit');
xlabel('\theta'), ylabel('\rho');
axis on
axis normal
hold on
P = houghpeaks(H,5,'threshold',ceil(0.3*max(H(:))));
x = T(P(:,2)); y = R(P(:,1));
plot(x,y,'s','color','white');
% Find lines and plot them
lines = houghlines(BW,T,R,P,'FillGap',5,'MinLength',7);
figure, imshow(I),hold on
max_len = 0;
for k = 1:length(lines)
xy = [lines(k).point1; lines(k).point2];
plot(xy(:,1),xy(:,2),'LineWidth',2,'Color','green');
% Plot beginnings and ends of lines
plot(xy(1,1),xy(1,2),'x','LineWidth',2,'Color','yellow');
plot(xy(2,1),xy(2,2),'x','LineWidth',2,'Color','red');
% Determine the endpoints of the longest line segment
len = norm(lines(k).point1 - lines(k).point2);
if ( len > max_len)
max_len = len;
xy_long = xy;
end
end
% highlight the longest line segment
plot(xy_long(:,1),xy_long(:,2),'LineWidth',2,'Color','blue');
PS: Matlab的例程写的还真不错,以后应该多参考下...
前言:
上一次写了关于PCA与LDA的文章,PCA的实现一般有两种,一种是用特征值分解去实现的,一种是用奇异值分解去实现的。在上篇文章中便是基于特征值分解的一种解释。特征值和奇异值在大部分人的印象中,往往是停留在纯粹的数学计算中。而且线性代数或者矩阵论里面,也很少讲任何跟特征值与奇异值有关的应用背景。奇异值分解是一个有着很明显的物理意义的一种方法,它可以将一个比较复杂的矩阵用更小更简单的几个子矩阵的相乘来表示,这些小矩阵描述的是矩阵的重要的特性。就像是描述一个人一样,给别人描述说这个人长得浓眉大眼,方脸,络腮胡,而且带个黑框的眼镜,这样寥寥的几个特征,就让别人脑海里面就有一个较为清楚的认识,实际上,人脸上的特征是有着无数种的,之所以能这么描述,是因为人天生就有着非常好的抽取重要特征的能力,让机器学会抽取重要的特征,SVD是一个重要的方法。
在机器学习领域,有相当多的应用与奇异值都可以扯上关系,比如做feature reduction的PCA,做数据压缩(以图像压缩为代表)的算法,还有做搜索引擎语义层次检索的LSI(Latent Semantic Indexing)
另外在这里抱怨一下,之前在百度里面搜索过SVD,出来的结果都是俄罗斯的一种狙击枪(AK47同时代的),是因为穿越火线这个游戏里面有一把狙击枪叫做SVD,而在Google上面搜索的时候,出来的都是奇异值分解(英文资料为主)。想玩玩战争游戏,玩玩COD不是非常好吗,玩山寨的CS有神马意思啊。国内的网页中的话语权也被这些没有太多营养的帖子所占据。真心希望国内的气氛能够更浓一点,搞游戏的人真正是喜欢制作游戏,搞Data Mining的人是真正喜欢挖数据的,都不是仅仅为了混口饭吃,这样谈超越别人才有意义,中文文章中,能踏踏实实谈谈技术的太少了,改变这个状况,从我自己做起吧。
前面说了这么多,本文主要关注奇异值的一些特性,另外还会稍稍提及奇异值的计算,不过本文不准备在如何计算奇异值上展开太多。另外,本文里面有部分不算太深的线性代数的知识,如果完全忘记了线性代数,看本文可能会有些困难。
一、奇异值与特征值基础知识:
特征值分解和奇异值分解在机器学习领域都是属于满地可见的方法。两者有着很紧密的关系,我在接下来会谈到,特征值分解和奇异值分解的目的都是一样,就是提取出一个矩阵最重要的特征。先谈谈特征值分解吧:
1)特征值:
如果说一个向量v是方阵A的特征向量,将一定可以表示成下面的形式:

这时候λ就被称为特征向量v对应的特征值,一个矩阵的一组特征向量是一组正交向量。特征值分解是将一个矩阵分解成下面的形式:

其中Q是这个矩阵A的特征向量组成的矩阵,Σ是一个对角阵,每一个对角线上的元素就是一个特征值。我这里引用了一些参考文献中的内容来说明一下。首先,要明确的是,一个矩阵其实就是一个线性变换,因为一个矩阵乘以一个向量后得到的向量,其实就相当于将这个向量进行了线性变换。比如说下面的一个矩阵:
 它其实对应的线性变换是下面的形式:
它其实对应的线性变换是下面的形式:

因为这个矩阵M乘以一个向量(x,y)的结果是:
 上面的矩阵是对称的,所以这个变换是一个对x,y轴的方向一个拉伸变换(每一个对角线上的元素将会对一个维度进行拉伸变换,当值>1时,是拉长,当值<1时时缩短),当矩阵不是对称的时候,假如说矩阵是下面的样子:
上面的矩阵是对称的,所以这个变换是一个对x,y轴的方向一个拉伸变换(每一个对角线上的元素将会对一个维度进行拉伸变换,当值>1时,是拉长,当值<1时时缩短),当矩阵不是对称的时候,假如说矩阵是下面的样子:

它所描述的变换是下面的样子:

这其实是在平面上对一个轴进行的拉伸变换(如蓝色的箭头所示),在图中,蓝色的箭头是一个最主要的变化方向(变化方向可能有不止一个),如果我们想要描述好一个变换,那我们就描述好这个变换主要的变化方向就好了。反过头来看看之前特征值分解的式子,分解得到的Σ矩阵是一个对角阵,里面的特征值是由大到小排列的,这些特征值所对应的特征向量就是描述这个矩阵变化方向(从主要的变化到次要的变化排列)
当矩阵是高维的情况下,那么这个矩阵就是高维空间下的一个线性变换,这个线性变化可能没法通过图片来表示,但是可以想象,这个变换也同样有很多的变换方向,我们通过特征值分解得到的前N个特征向量,那么就对应了这个矩阵最主要的N个变化方向。我们利用这前N个变化方向,就可以近似这个矩阵(变换)。也就是之前说的:提取这个矩阵最重要的特征。总结一下,特征值分解可以得到特征值与特征向量,特征值表示的是这个特征到底有多重要,而特征向量表示这个特征是什么,可以将每一个特征向量理解为一个线性的子空间,我们可以利用这些线性的子空间干很多的事情。不过,特征值分解也有很多的局限,比如说变换的矩阵必须是方阵。
(说了这么多特征值变换,不知道有没有说清楚,请各位多提提意见。)
2)奇异值:
下面谈谈奇异值分解。特征值分解是一个提取矩阵特征很不错的方法,但是它只是对方阵而言的,在现实的世界中,我们看到的大部分矩阵都不是方阵,比如说有N个学生,每个学生有M科成绩,这样形成的一个N * M的矩阵就不可能是方阵,我们怎样才能描述这样普通的矩阵呢的重要特征呢?奇异值分解可以用来干这个事情,奇异值分解是一个能适用于任意的矩阵的一种分解的方法:
 假设A是一个N * M的矩阵,那么得到的U是一个N * N的方阵(里面的向量是正交的,U里面的向量称为左奇异向量),Σ是一个N * M的矩阵(除了对角线的元素都是0,对角线上的元素称为奇异值),V’(V的转置)是一个N * N的矩阵,里面的向量也是正交的,V里面的向量称为右奇异向量),从图片来反映几个相乘的矩阵的大小可得下面的图片
假设A是一个N * M的矩阵,那么得到的U是一个N * N的方阵(里面的向量是正交的,U里面的向量称为左奇异向量),Σ是一个N * M的矩阵(除了对角线的元素都是0,对角线上的元素称为奇异值),V’(V的转置)是一个N * N的矩阵,里面的向量也是正交的,V里面的向量称为右奇异向量),从图片来反映几个相乘的矩阵的大小可得下面的图片

那么奇异值和特征值是怎么对应起来的呢?首先,我们将一个矩阵A的转置 * A,将会得到一个方阵,我们用这个方阵求特征值可以得到: 这里得到的v,就是我们上面的右奇异向量。此外我们还可以得到:
这里得到的v,就是我们上面的右奇异向量。此外我们还可以得到:
 这里的σ就是上面说的奇异值,u就是上面说的左奇异向量。奇异值σ跟特征值类似,在矩阵Σ中也是从大到小排列,而且σ的减少特别的快,在很多情况下,前10%甚至1%的奇异值的和就占了全部的奇异值之和的99%以上了。也就是说,我们也可以用前r大的奇异值来近似描述矩阵,这里定义一下部分奇异值分解:
这里的σ就是上面说的奇异值,u就是上面说的左奇异向量。奇异值σ跟特征值类似,在矩阵Σ中也是从大到小排列,而且σ的减少特别的快,在很多情况下,前10%甚至1%的奇异值的和就占了全部的奇异值之和的99%以上了。也就是说,我们也可以用前r大的奇异值来近似描述矩阵,这里定义一下部分奇异值分解:

r是一个远小于m、n的数,这样矩阵的乘法看起来像是下面的样子:

右边的三个矩阵相乘的结果将会是一个接近于A的矩阵,在这儿,r越接近于n,则相乘的结果越接近于A。而这三个矩阵的面积之和(在存储观点来说,矩阵面积越小,存储量就越小)要远远小于原始的矩阵A,我们如果想要压缩空间来表示原矩阵A,我们存下这里的三个矩阵:U、Σ、V就好了。
二、奇异值的计算:
奇异值的计算是一个难题,是一个O(N^3)的算法。在单机的情况下当然是没问题的,matlab在一秒钟内就可以算出1000 * 1000的矩阵的所有奇异值,但是当矩阵的规模增长的时候,计算的复杂度呈3次方增长,就需要并行计算参与了。Google的吴军老师在数学之美系列谈到SVD的时候,说起Google实现了SVD的并行化算法,说这是对人类的一个贡献,但是也没有给出具体的计算规模,也没有给出太多有价值的信息。
其实SVD还是可以用并行的方式去实现的,在解大规模的矩阵的时候,一般使用迭代的方法,当矩阵的规模很大(比如说上亿)的时候,迭代的次数也可能会上亿次,如果使用Map-Reduce框架去解,则每次Map-Reduce完成的时候,都会涉及到写文件、读文件的操作。个人猜测Google云计算体系中除了Map-Reduce以外应该还有类似于MPI的计算模型,也就是节点之间是保持通信,数据是常驻在内存中的,这种计算模型比Map-Reduce在解决迭代次数非常多的时候,要快了很多倍。
Lanczos迭代就是一种解对称方阵部分特征值的方法(之前谈到了,解A’* A得到的对称方阵的特征值就是解A的右奇异向量),是将一个对称的方程化为一个三对角矩阵再进行求解。按网上的一些文献来看,Google应该是用这种方法去做的奇异值分解的。请见Wikipedia上面的一些引用的论文,如果理解了那些论文,也“几乎”可以做出一个SVD了。
由于奇异值的计算是一个很枯燥,纯数学的过程,而且前人的研究成果(论文中)几乎已经把整个程序的流程图给出来了。更多的关于奇异值计算的部分,将在后面的参考文献中给出,这里不再深入,我还是focus在奇异值的应用中去。
三、奇异值与主成分分析(PCA):
主成分分析在上一节里面也讲了一些,这里主要谈谈如何用SVD去解PCA的问题。PCA的问题其实是一个基的变换,使得变换后的数据有着最大的方差。方差的大小描述的是一个变量的信息量,我们在讲一个东西的稳定性的时候,往往说要减小方差,如果一个模型的方差很大,那就说明模型不稳定了。但是对于我们用于机器学习的数据(主要是训练数据),方差大才有意义,不然输入的数据都是同一个点,那方差就为0了,这样输入的多个数据就等同于一个数据了。以下面这张图为例子:
 这个假设是一个摄像机采集一个物体运动得到的图片,上面的点表示物体运动的位置,假如我们想要用一条直线去拟合这些点,那我们会选择什么方向的线呢?当然是图上标有signal的那条线。如果我们把这些点单纯的投影到x轴或者y轴上,最后在x轴与y轴上得到的方差是相似的(因为这些点的趋势是在45度左右的方向,所以投影到x轴或者y轴上都是类似的),如果我们使用原来的xy坐标系去看这些点,容易看不出来这些点真正的方向是什么。但是如果我们进行坐标系的变化,横轴变成了signal的方向,纵轴变成了noise的方向,则就很容易发现什么方向的方差大,什么方向的方差小了。
这个假设是一个摄像机采集一个物体运动得到的图片,上面的点表示物体运动的位置,假如我们想要用一条直线去拟合这些点,那我们会选择什么方向的线呢?当然是图上标有signal的那条线。如果我们把这些点单纯的投影到x轴或者y轴上,最后在x轴与y轴上得到的方差是相似的(因为这些点的趋势是在45度左右的方向,所以投影到x轴或者y轴上都是类似的),如果我们使用原来的xy坐标系去看这些点,容易看不出来这些点真正的方向是什么。但是如果我们进行坐标系的变化,横轴变成了signal的方向,纵轴变成了noise的方向,则就很容易发现什么方向的方差大,什么方向的方差小了。
一般来说,方差大的方向是信号的方向,方差小的方向是噪声的方向,我们在数据挖掘中或者数字信号处理中,往往要提高信号与噪声的比例,也就是信噪比。对上图来说,如果我们只保留signal方向的数据,也可以对原数据进行不错的近似了。
PCA的全部工作简单点说,就是对原始的空间中顺序地找一组相互正交的坐标轴,第一个轴是使得方差最大的,第二个轴是在与第一个轴正交的平面中使得方差最大的,第三个轴是在与第1、2个轴正交的平面中方差最大的,这样假设在N维空间中,我们可以找到N个这样的坐标轴,我们取前r个去近似这个空间,这样就从一个N维的空间压缩到r维的空间了,但是我们选择的r个坐标轴能够使得空间的压缩使得数据的损失最小。
还是假设我们矩阵每一行表示一个样本,每一列表示一个feature,用矩阵的语言来表示,将一个m * n的矩阵A的进行坐标轴的变化,P就是一个变换的矩阵从一个N维的空间变换到另一个N维的空间,在空间中就会进行一些类似于旋转、拉伸的变化。

而将一个m * n的矩阵A变换成一个m * r的矩阵,这样就会使得本来有n个feature的,变成了有r个feature了(r < n),这r个其实就是对n个feature的一种提炼,我们就把这个称为feature的压缩。用数学语言表示就是:
 但是这个怎么和SVD扯上关系呢?之前谈到,SVD得出的奇异向量也是从奇异值由大到小排列的,按PCA的观点来看,就是方差最大的坐标轴就是第一个奇异向量,方差次大的坐标轴就是第二个奇异向量…我们回忆一下之前得到的SVD式子:
但是这个怎么和SVD扯上关系呢?之前谈到,SVD得出的奇异向量也是从奇异值由大到小排列的,按PCA的观点来看,就是方差最大的坐标轴就是第一个奇异向量,方差次大的坐标轴就是第二个奇异向量…我们回忆一下之前得到的SVD式子:
 在矩阵的两边同时乘上一个矩阵V,由于V是一个正交的矩阵,所以V转置乘以V得到单位阵I,所以可以化成后面的式子
在矩阵的两边同时乘上一个矩阵V,由于V是一个正交的矩阵,所以V转置乘以V得到单位阵I,所以可以化成后面的式子
 将后面的式子与A * P那个m * n的矩阵变换为m * r的矩阵的式子对照看看,在这里,其实V就是P,也就是一个变化的向量。这里是将一个m * n 的矩阵压缩到一个m * r的矩阵,也就是对列进行压缩,如果我们想对行进行压缩(在PCA的观点下,对行进行压缩可以理解为,将一些相似的sample合并在一起,或者将一些没有太大价值的sample去掉)怎么办呢?同样我们写出一个通用的行压缩例子:
将后面的式子与A * P那个m * n的矩阵变换为m * r的矩阵的式子对照看看,在这里,其实V就是P,也就是一个变化的向量。这里是将一个m * n 的矩阵压缩到一个m * r的矩阵,也就是对列进行压缩,如果我们想对行进行压缩(在PCA的观点下,对行进行压缩可以理解为,将一些相似的sample合并在一起,或者将一些没有太大价值的sample去掉)怎么办呢?同样我们写出一个通用的行压缩例子:
 这样就从一个m行的矩阵压缩到一个r行的矩阵了,对SVD来说也是一样的,我们对SVD分解的式子两边乘以U的转置U'
这样就从一个m行的矩阵压缩到一个r行的矩阵了,对SVD来说也是一样的,我们对SVD分解的式子两边乘以U的转置U'
 这样我们就得到了对行进行压缩的式子。可以看出,其实PCA几乎可以说是对SVD的一个包装,如果我们实现了SVD,那也就实现了PCA了,而且更好的地方是,有了SVD,我们就可以得到两个方向的PCA,如果我们对A’A进行特征值的分解,只能得到一个方向的PCA。
这样我们就得到了对行进行压缩的式子。可以看出,其实PCA几乎可以说是对SVD的一个包装,如果我们实现了SVD,那也就实现了PCA了,而且更好的地方是,有了SVD,我们就可以得到两个方向的PCA,如果我们对A’A进行特征值的分解,只能得到一个方向的PCA。
四、奇异值与潜在语义索引LSI:
潜在语义索引(Latent Semantic Indexing)与PCA不太一样,至少不是实现了SVD就可以直接用的,不过LSI也是一个严重依赖于SVD的算法,之前吴军老师在矩阵计算与文本处理中的分类问题中谈到:
“三个矩阵有非常清楚的物理含义。第一个矩阵X中的每一行表示意思相关的一类词,其中的每个非零元素表示这类词中每个词的重要性(或者说相关性),数值越大越相关。最后一个矩阵Y中的每一列表示同一主题一类文章,其中每个元素表示这类文章中每篇文章的相关性。中间的矩阵则表示类词和文章雷之间的相关性。因此,我们只要对关联矩阵A进行一次奇异值分解,w 我们就可以同时完成了近义词分类和文章的分类。(同时得到每类文章和每类词的相关性)。”
上面这段话可能不太容易理解,不过这就是LSI的精髓内容,我下面举一个例子来说明一下,下面的例子来自LSA tutorial,具体的网址我将在最后的引用中给出:
 这就是一个矩阵,不过不太一样的是,这里的一行表示一个词在哪些title中出现了(一行就是之前说的一维feature),一列表示一个title中有哪些词,(这个矩阵其实是我们之前说的那种一行是一个sample的形式的一种转置,这个会使得我们的左右奇异向量的意义产生变化,但是不会影响我们计算的过程)。比如说T1这个title中就有guide、investing、market、stock四个词,各出现了一次,我们将这个矩阵进行SVD,得到下面的矩阵:
这就是一个矩阵,不过不太一样的是,这里的一行表示一个词在哪些title中出现了(一行就是之前说的一维feature),一列表示一个title中有哪些词,(这个矩阵其实是我们之前说的那种一行是一个sample的形式的一种转置,这个会使得我们的左右奇异向量的意义产生变化,但是不会影响我们计算的过程)。比如说T1这个title中就有guide、investing、market、stock四个词,各出现了一次,我们将这个矩阵进行SVD,得到下面的矩阵:
 左奇异向量表示词的一些特性,右奇异向量表示文档的一些特性,中间的奇异值矩阵表示左奇异向量的一行与右奇异向量的一列的重要程序,数字越大越重要。
左奇异向量表示词的一些特性,右奇异向量表示文档的一些特性,中间的奇异值矩阵表示左奇异向量的一行与右奇异向量的一列的重要程序,数字越大越重要。
继续看这个矩阵还可以发现一些有意思的东西,首先,左奇异向量的第一列表示每一个词的出现频繁程度,虽然不是线性的,但是可以认为是一个大概的描述,比如book是0.15对应文档中出现的2次,investing是0.74对应了文档中出现了9次,rich是0.36对应文档中出现了3次;
其次,右奇异向量中一的第一行表示每一篇文档中的出现词的个数的近似,比如说,T6是0.49,出现了5个词,T2是0.22,出现了2个词。
然后我们反过头来看,我们可以将左奇异向量和右奇异向量都取后2维(之前是3维的矩阵),投影到一个平面上,可以得到:
 在图上,每一个红色的点,都表示一个词,每一个蓝色的点,都表示一篇文档,这样我们可以对这些词和文档进行聚类,比如说stock 和 market可以放在一类,因为他们老是出现在一起,real和estate可以放在一类,dads,guide这种词就看起来有点孤立了,我们就不对他们进行合并了。按这样聚类出现的效果,可以提取文档集合中的近义词,这样当用户检索文档的时候,是用语义级别(近义词集合)去检索了,而不是之前的词的级别。这样一减少我们的检索、存储量,因为这样压缩的文档集合和PCA是异曲同工的,二可以提高我们的用户体验,用户输入一个词,我们可以在这个词的近义词的集合中去找,这是传统的索引无法做到的。
在图上,每一个红色的点,都表示一个词,每一个蓝色的点,都表示一篇文档,这样我们可以对这些词和文档进行聚类,比如说stock 和 market可以放在一类,因为他们老是出现在一起,real和estate可以放在一类,dads,guide这种词就看起来有点孤立了,我们就不对他们进行合并了。按这样聚类出现的效果,可以提取文档集合中的近义词,这样当用户检索文档的时候,是用语义级别(近义词集合)去检索了,而不是之前的词的级别。这样一减少我们的检索、存储量,因为这样压缩的文档集合和PCA是异曲同工的,二可以提高我们的用户体验,用户输入一个词,我们可以在这个词的近义词的集合中去找,这是传统的索引无法做到的。
不知道按这样描述,再看看吴军老师的文章,是不是对SVD更清楚了?:-D
参考资料:
1)A Tutorial on Principal Component Analysis, Jonathon Shlens
这是我关于用SVD去做PCA的主要参考资料
2)http://www.ams.org/samplings/feature-column/fcarc-svd
关于svd的一篇概念好文,我开头的几个图就是从这儿截取的
3)http://www.puffinwarellc.com/index.php/news-and-articles/articles/30-singular-value-decomposition-tutorial.html
另一篇关于svd的入门好文
4)http://www.puffinwarellc.com/index.php/news-and-articles/articles/33-latent-semantic-analysis-tutorial.html
svd与LSI的好文,我后面LSI中例子就是来自此
5)http://www.miislita.com/information-retrieval-tutorial/svd-lsi-tutorial-1-understanding.html
另一篇svd与LSI的文章,也还是不错,深一点,也比较长
6)Singular Value Decomposition and Principal Component Analysis, Rasmus Elsborg Madsen, Lars Kai Hansen and Ole Winther, 2004
跟1)里面的文章比较类似
转自:http://www.cnblogs.com/LeftNotEasy/archive/2011/01/19/svd-and-applications.html